Misteriosi incendi su Marte (seconda parte)
 di Fabio Camplone
di Fabio Camplone
8 Novembre 2224 sulla Terra – 6 febbraio 150 su Marte
Spazio Porto di Nuova Roma Marziana, capitale della colonia italiana sul pianeta rosso
(.. continua) Mi viene spiegato che circa sei mesi fa, i cyborg meccatronici coordinati da Edoard, avevano installato una serie di sensori sugli impianti per soddisfare una nuova normativa sul pianeta rosso per abbattere le infiltrazioni di polvere marziana negli impianti industriali. Alfred aggiunge che da allora la polvere rossa negli impianti è sensibilmente diminuita, a beneficio della qualità dei pannelli solari prodotti; purtroppo però, ogni 30 giorni circa, si sviluppa un incendio!
 Robert sulla sua Vespa marziana
Robert sulla sua Vespa marziana
Il problema è sicuramente molto serio; vale la pena affrontarlo con l’antico SPS (Simple Problem Solving): potentissimo strumento nato agli albori del LEAN, ma per me ancora insostituibile dopo tanti anni. Chiedo di avere una lavagna a cristalli liquidi, mi ricorda quelle cartacee che si usavano sulla Terra e rimane uno strumento molto efficace per lavorare insieme. Applicheremo il metodo del Problem Solving Semplice a 4 fasi: messo a punto dalla Toyota e tutt’ora un metodo infallibile per la risoluzione di problemi non eccessivamente complicati. Insieme definiamo il problema con il gap (incendi ogni 30 giorni vs 0 incendi) e l’impatto. A questo punto passiamo ad affrontare la seconda fase del Problem Solving, chiedo ad Alfred di organizzare un Gemba1 (sopralluogo mirato) sul luogo dove si è verificato l’ultimo incendio.
L’impianto è a circa un chilometro, indossiamo gli zaini con i nuovi propulsori, sono silenziosissimi, sembra di essere in volo libero! In pochi minuti ci sbizzarriamo in tante acrobazie e capriole: per fortuna ci sono delle sfere di campo magnetico attorno a noi, per cui non ci facciamo male. Atterriamo delicatamente sul posto: c’è una squadra di robot che sta ripulendo la zona e riverniciando le parti annerite. Ci raggiunge anche il supervisore dei robot, Robert Mambel: è un fanatico di un antico scooter inventato da Corradino D’Ascanio (ingegnere abruzzese, di un’antica città chiamata Popoli: si narra che inventò anche il primo progenitore dell’elicottero, un vero genio) e presentato per la prima volta nel 1946 dalla Piaggio & Co, un’azienda italiana di Pontedera, in Toscana. Robert ha modificato la Vespa ricevuta in eredità e lo usa in combinazione con il suo zaino: tutto certificato dalla motorizzazione civile marziana, mentre sulla Terra è un mezzo vietato a causa del traffico incredibile di mezzi volanti di tutti i tipi.
Ci conosciamo tutti benissimo, siamo stati i pionieri del LEAN in uno stabilimento glorioso nel paese di Alanno, nella valle del fiume Pescara dove producevamo prodotti di largo consumo molto diffusi all’epoca.
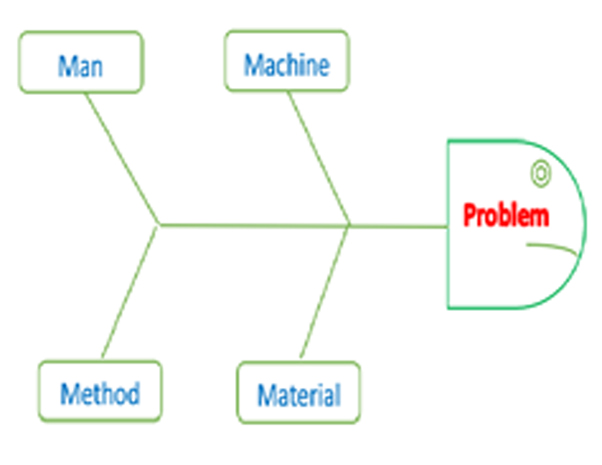 Diagramma a spina di pesce
Diagramma a spina di pesce
Il sopralluogo, il Gemba, prevede si cercare il POC (Point of Cause, nell’inglese arcaico), il punto cioè dove il problema si è evidenziato la prima volta, nel nostro caso l’incendio. Robert e Edoard ci spiegano di aver dato istruzioni ai robot di partire con il cablaggio di fibra ottica dalla linea Hobemars-1. Il portellone di sicurezza è rimasto aperto, i droni-pompieri sono intervenuti in massa in questo punto. Questo è un buon segno, ci stiamo probabilmente avvicinando al POC di questo problema. Edoard è il primo a entrare e immediatamente butta un urlo: << Mambè..Mò t’accid’!!2>>
Lo raggiungiamo tutti, Robert è tutto rosso in viso: nonostante siamo tutti cyborg, le emozioni sono le stesse dei nostri antenati! Edoard ha trovato il POC: i robot hanno fatto passare i cavi attorno allo sportello: tutte le volte che questo viene aperto per ispezioni e pulizie, il cavo viene spellato. A questo punto, Edoard, ora calmatosi, tranquillizza Robert, gli errori possono sempre succedere, è fondamentale focalizzarsi sui processi, non trovare i colpevoli, dopo secoli l’abbiamo finalmente capito! Sicuramente Robert non ha sbagliato lo standard di installazione volutamente. Edoard gli chiede quindi di organizzare ispezioni di tutti gli sportelli delle linee Homemars, ce ne sono 30.
Ci rimettiamo gli zaini e rientriamo nella palazzina uffici. I robot coordinati da Robert fanno immediatamente le ispezioni e inviano in tempo zero tutti i dati (foto, video, temperature, etc…) all’Intelligenza Artificiale per analizzarli. Anticamente, una volta trovato il POC, saremmo poi passati al diagramma a spina di pesce (vedi Figura 2) con le 4M (Man/Manodopera, Machine/Macchina, Method/Metodo e Material/Materiale) per cercare le cause dirette e arrivare con i 5 Perchè alle cause di fondo: ora con i miliardi di dati a disposizione e con l’analisi velocissima, in pochi secondi riceviamo un report dettagliato della fase 2 del Problem Solving.
Nel report c’è anche un video dove si mostra che tutti i cavi vicini agli sportelli hanno iniziali segni di usura, lo stesso punto di causa, e che poi si innescano le scintille con una frequenza molto vicina ai 3 mesi!
Sono molto soddisfatto, in meno di un’ora abbiamo risolto questo problema! Ora il cervellone si occuperà della fase 3 (trovare una contromisura e testarla) e della fase 4 (conferma della contromisura). Un altro aspetto che mi rende molto felice, è il fatto che il fattore umano sia ancora decisivo: sono stato io a chiedere di organizzare il Gemba sul posto, è stato poi Edoard a trovare il POC. Con queste indicazioni, i robot hanno fornito tutte le informazioni all’Intelligenza artificiale che ha semplicemente unito tutti i puntini ed ha concluso in pochi minuti le fasi 3 e quattro: anche questa volta c’è un grande lavoro di squadra con umani-cyborg, robot e super computer pensanti! (continua..)
1° Gemba: si intende fare un sopralluogo dove il problema è stato osservato; è importante per capire le cause e pensare alle contromisure per evitare che il problema si ripresenti di nuovo.
2° Mo’ ttaccid’: si tratta di un dialetto che usavamo ad Alanno, la traduzione letterale è “Adesso ti uccido”.
